Raptor Innovation Summit 2026 — Registration is Live
Introducing New Eagle’s New Electric Vehicle Development Platform
When designing your electric or hybrid vehicle (EV or HEV), the supervisory controller is one of the most important components of your system. It is the “brain” of the vehicle and takes time and effort to get correct.
Luckily, New Eagle’s new Electric Vehicle Development Platform (EVDP) makes this process much easier.
Curious? Let’s explore our revamped base model and tools to see if this Development Platform is right for your next EV project.
The New Base Model
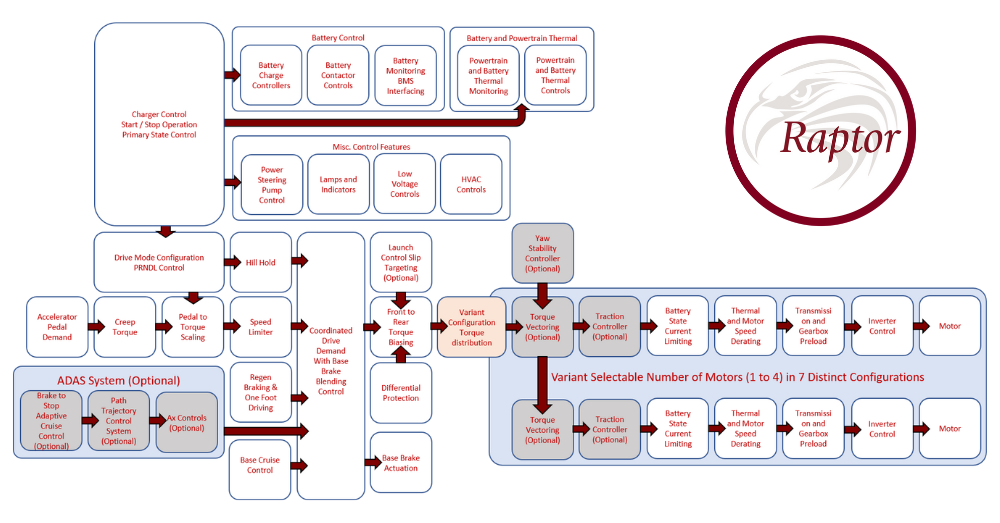
The Base model of the EVDP built-in Mathworks Simulink & Stateflow is the starting point for your electric vehicle supervisor. You get the most common control strategies for EV applications such as core startup/shutdown, drive mode, charging, torque request, regenerative braking, and transmission control. The major components are structured as libraries, which allows for parallel model development by multiple team members.
New Eagle’s Electric Vehicle Development Platform offers common EV system component libraries with the base model that provide teams the ability to quickly build and easily adjust the software using the Raptor embedded Model-Based Design (eMBD) platform.
Custom Configuration Tools
We know that your EV project is not the same as any other. Our Electric Vehicle Development Platform provides configuration tools to change architectures and select specific BMS, chargers, converters, inverters, motors, electric axles (single or multiple motors), and other components.
These tools allow you to save time customizing your electric drivetrain and vehicle system.
Collaborate, Simulate, and Redeploy
The EVDP is a complete overhaul of New Eagle’s EV Supervisory Template Model, a control software model that was developed over 15 years for over 100 electric drive projects. In addition to a new model architecture and configuration tools, the EVDP adds capabilities for collaboration, simulation, and rapid reuse and redeployment.
By enabling team collaboration, you can develop new systems with multiple people simultaneously—without getting in each other’s way. Users choose which areas and sub-libraries to work on, preventing members from overwriting someone else’s work.
Check your progress and verify performance with closed-loop simulation testing before hardware integration. The open-loop simulation feature will allow you to quickly replay recorded data through models to find and fix any issues. Plus, our models are componentized, so you can easily set up subsystem simulations as needed.
Simulation speeds up development, as does our decomposed model architecture. With common repositories and subsystem libraries, you can go from one motor to four (with seven different configurations) in just minutes!
Series Hybrid Add-On
Add the optional Series Hybrid Library to our Base EV Dev Platform for more options with genset control. You get a clean interface with our base software for seamless integration. This add-on allows you to modify:
- Regeneration criteria
- Engine start control
- Genset speed/torque control sequencing
- Torque limiting
- Manual idle control
As you can see with the Series Hybrid, the EVDP is designed to work with plug-and-play model expansions so you can easily supplement with additional features.
Vehicle Control & ADAS Control Add-On
When you have the control offered by the EVDP, you may want vehicle control features including traction control, torque vectoring, and ADAS to your model.
Current features for Advanced Driver Assistance Systems (ADAS) include:
- Full-speed adaptive cruise control (ACC),
- Automatic emergency braking (AEB)
- Forward collision warning (FCW)
Coming soon, you can also expect to have:
- Lane keep assist (LKA),
- Lane centering control (LCC), and
- Vehicle following model (VFM)
Shave Months Off Development Time with New Eagle’s comprehensive, scalable Electric Vehicle Development Platform (EVDP)
The EVDP will expedite your next EV project from development through production, shaving months off your timeline. You have ownership of your model and can obtain support from New Eagle.
Reach out to our sales team today to determine what works best for your EV project.